약간 회전한 장애물 피하기 (No Sensor)
이번에는 약간 회전한 장애물을 피해 타깃에 도달하는 학습을 진행했다.
Observation (First Try, Second Try)
| sensor.AddObservation |
|---|
| target.localPosition |
| transform.localPosition |
| rigidbody.velocity.x |
| rigidbody.velocity.z |
| obstacle.transform.localPosition |
| obstacle.transform.localScale |
| obstacle.transform.localRotation.eulerAngles |
이전 포스트와 동일
First Try
Policy
| Situation | Reward | EndEpisode |
|---|
| 밖으로 떨어짐 | -5 | O |
| 타깃에 도달 | +5 | O |
| 장애물에 닿아있는 동안 | 틱당 -0.005 | |
| Living | 틱당 -0.001 | |
이전 포스트와 동일한 Policy 로 진행하였다.
Result
이번에도 회전은 한 방향으로만 진행했으며,
- 블록의 오른쪽 부분에 가까우면 꽤 잘 작동했으나...
- 타깃이 안쪽으로 들어갈수록 어려워하는 것을 확인할 수 있다. 제대로 장애물의 크기를 고려해 인식하고 피할 수는 없는 것 같다.
Second Try (Imitation Learning)
Policy
| Situation | Reward | EndEpisode |
|---|
| 밖으로 떨어짐 | -5 | O |
| 타깃에 도달 | +5 | O |
| 장애물에 닿아있는 동안 | 틱당 -0.005 | |
| Living | 틱당 -0.001 | |
First Try 와 동일한 Policy 로 진행하였다.
Settings
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
gail:
strength: 0.5
demo_path: Demos/RollerDemo.demo
behavioral_cloning:
strength: 0.5
demo_path: Demos/RollerDemo.demo
그래서 Imitiation Learning 을 적용해 보기로 했다.
유니티의 Demonstration Recorder 를 이용해 직접 조정하여 이상적인 Behavior 를 담은 데모를 위와 같이 찍었고, 이를 Hyperparameter 에 지정했다.
Hyperparameter 의 gail 과 behavioral_cloning 값을 각각 strength 0.5 씩 지정하여 진행하였다.
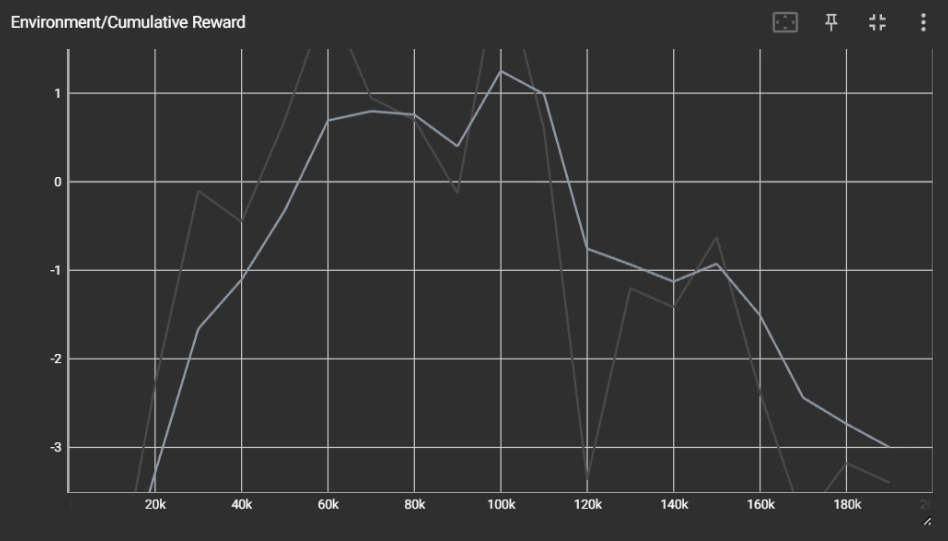
Result
결과는 위처럼 실패다.
확실히 자신 기준 오른쪽에 생성되면 오른쪽으로 돌고, 왼쪽으로 생성되면 왼쪽으로 돌려는 모습을 보이기는 했으나,
데모의 영향이 상당히 큰지 학습이 진행될 수록 이상한 움직임을 보였다.
strength 를 줄여서 학습을 진행해 보기도 했으나, 결과는 비슷했다.
Observation 으로 준 Obstacle 관련 값들이 아무래도 학습에 큰 영향을 주지 못하는 것 같다.
위와 같은 장애물을 피해 타깃에 도달하기 위해서는 센서를 사용할 필요가 있는 것 같다.